MIT Robotics Competition
(2017)
Design and Manufacturing I (2.007) is a sophomore class at MIT with a rich history in engineering education. The class was introduced in the 1970’s and went on to lay the basis for many robotics competitions including FIRST robotics. In 2.007 each student designs and builds their own robot from a limited set of materials to compete in a large 1v1 tournament at the end of the semester.
 Each student must fabricate within the constraints of a build kit which includes simple stock materials like aluminum extrusions and plastic rods, motors and servos, an Arduino, and a limited selection of mechanical and electrical components.
Each student must fabricate within the constraints of a build kit which includes simple stock materials like aluminum extrusions and plastic rods, motors and servos, an Arduino, and a limited selection of mechanical and electrical components.
 My robot consists of 57 custom parts, all of which were designed and fabricated by me over the course of the semester.
My robot consists of 57 custom parts, all of which were designed and fabricated by me over the course of the semester.
 Each year’s game board is different, with different ways to score points. 2017 featured a Star-Wars theme, where players could score points by placing Storm Trooper action figures in designated areas, tilting lightsabers, or spinning flywheels on the X-wing’s “thrusters”.
Each year’s game board is different, with different ways to score points. 2017 featured a Star-Wars theme, where players could score points by placing Storm Trooper action figures in designated areas, tilting lightsabers, or spinning flywheels on the X-wing’s “thrusters”.
Video of my robot engaging and spinning the flywheel autonomously. Although there were many ways to score points in the competition, I narrowed my focus to performing just one task consistently and taking advantage of a 2x point multiplier for ‘hands-free’ autonomous operation.
 A flexible coupling fabricated out of rubber strips accounts for any angular or planar misalignment between the robot and the flywheel. This design is similar to commercial ‘double loop’ shaft couplings.
A flexible coupling fabricated out of rubber strips accounts for any angular or planar misalignment between the robot and the flywheel. This design is similar to commercial ‘double loop’ shaft couplings.
The coupling can accommodate up to 17 degrees of angular misalignment and 20mm of lateral and axial misalignment.
 The flywheel must be spun up to 25 rad/sec (239 RPM) to hit the maximum point value. With a gear train matched to the motors’ torque and speed characteristics, the robot was able to accelerate the flywheel to this max speed in about 15 seconds.
The flywheel must be spun up to 25 rad/sec (239 RPM) to hit the maximum point value. With a gear train matched to the motors’ torque and speed characteristics, the robot was able to accelerate the flywheel to this max speed in about 15 seconds.
 Through the consistency of my robot and a bit of luck, I secured first place out of 196 students in the end of semester tournament.
Through the consistency of my robot and a bit of luck, I secured first place out of 196 students in the end of semester tournament.
 The robot must start out crouched to avoid obstacles on the game board and then spring up to the height of the flywheel. To achieve this movement, the robot has four spring-loaded linkages that can be actuated by a servo.
The robot must start out crouched to avoid obstacles on the game board and then spring up to the height of the flywheel. To achieve this movement, the robot has four spring-loaded linkages that can be actuated by a servo.
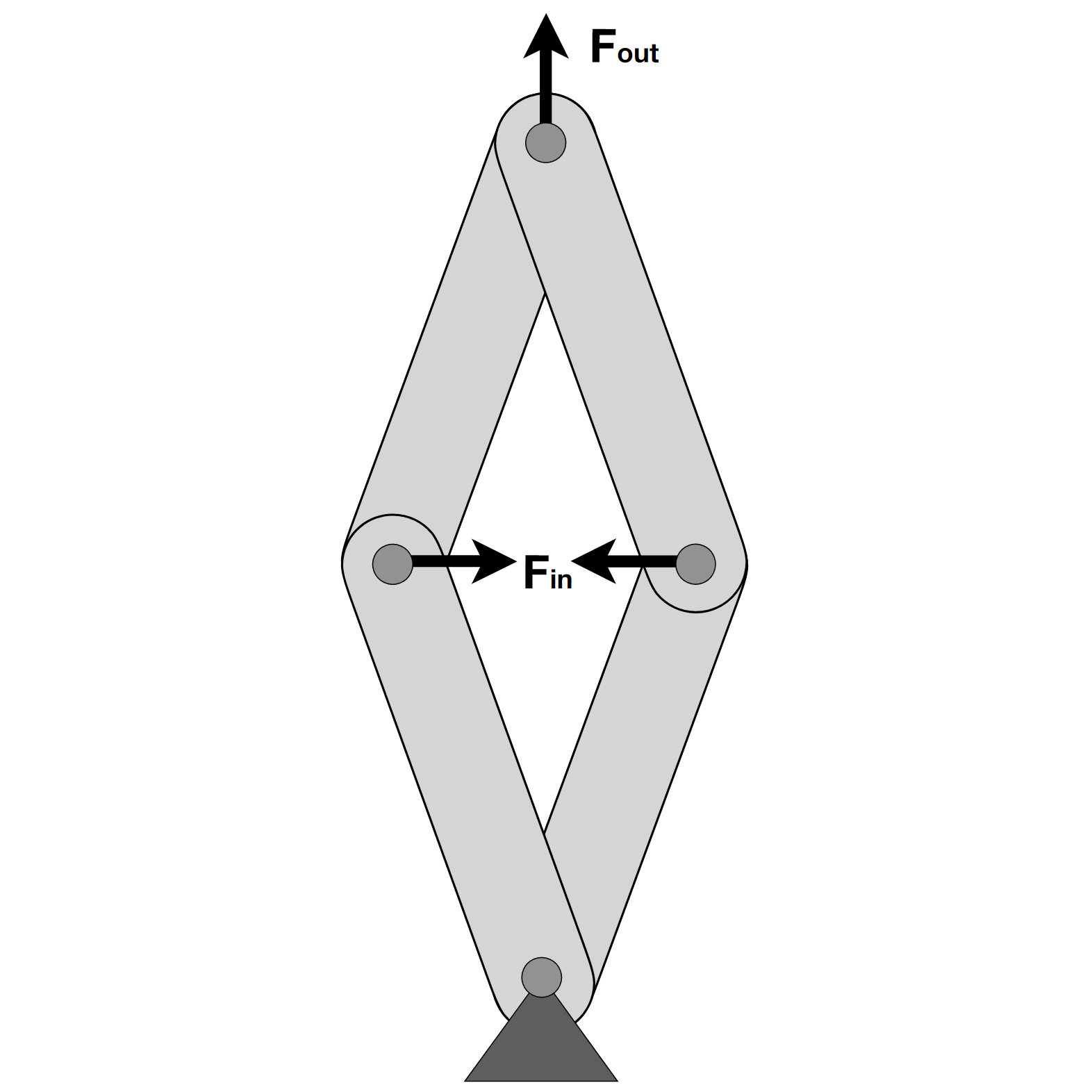
 The design of the linkages is inspired by scissor style car jacks. Springs provide the input force to extend the linkage.
The design of the linkages is inspired by scissor style car jacks. Springs provide the input force to extend the linkage.
 The input force that the springs provide is larger than the force required to offset the weight of the robot for the entire linkage stroke except the very beginning. This means that the robot can stay crouched until a servo nudges the linkages to open up.
The input force that the springs provide is larger than the force required to offset the weight of the robot for the entire linkage stroke except the very beginning. This means that the robot can stay crouched until a servo nudges the linkages to open up.